
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- mariaDB
- 데이터 베이스
- C언어
- 반복문
- 토픽
- 오늘도 우라라 공략
- ros
- 오늘도 우라라 펫 공략
- 오늘도 우라라 펫
- 리눅스
- 우분투
- publish
- 기초
- MSG
- 마리아 DB
- LeetCode
- ubuntu
- Subscribe
- JungOl
- 환경설정
- topic
- 프로그래밍
- while
- C++
- 오늘도 우라라
- 그랑사가
- install opencv-4.4.0 on ubuntu 22.04
- mysql
- 등차수열
- Linux
- Today
- Total
하루의 쉼터
[Sensor] Hesai Lidar XT32 Ros2 이용 본문
1. 실물

2. 환경 및 설정
| Viwer | Windows11 |
| Ros2 OS | Ubuntu22.04 |
| Ros2 Version | Humble |
| Grapic Card | NVIDIA GeForce GTX 1060 |
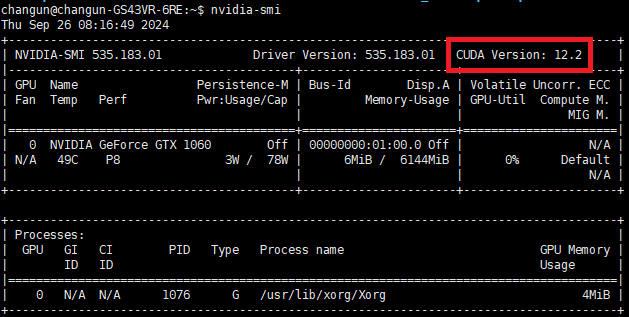
| Nvidia Driver Version | 535.183.01 |
Velodyne과 마찬가지로 네트워크 설정을 해줘야한다.
2023.04.26 - [프로그래밍/정보] - [Sensor] Velodyne Lidar(VLP-16) 윈도우 ip 및 뷰어 셋팅
[Sensor] Velodyne Lidar(VLP-16) 윈도우 ip 및 뷰어 셋팅
| Velodyne Lidar(VLP-16) 윈도우 ip 및 뷰어 셋팅 Velodyne Lidar를 사용하기 위해서는 몇가지 설정을 해줘야 하는데 ip 및 뷰어 셋팅하는법에 대해서 쓰고자 한다. 뷰어를 통해 보려면 ip 셋팅이 우선적으로
changun516.tistory.com
Velodyne과 마찬가지로 초기 Host IP는 192.168.1.201에서 설정하면 된다.
3. Viewer 이용 테스트
다운로드 홈페이지 및 메뉴얼
https://www.hesaitech.com/downloads/
Product Software Downloads | HESAI Technology
Download any product software and documentation needed with ease. Our downloads page includes support documents for each of our products; take a look now.
www.hesaitech.com
파일을 받아 설치하면 되며 ubutu 환경에서도 가능하다
* 날짜는 왜 잘못 표기 된걸로 보이나 올바른 데이터가 들어오는지 본것이므로 수정하진 않았음.
4. Ros2 설정
* 여기서부턴 Ubuntu 22.04이며 Humble 설치 된 컴퓨터에서 진행( 필자는 포멧 후 ros2만 설치 되어있는 PC )
https://github.com/HesaiTechnology/HesaiLidar_ROS_2.0
GitHub - HesaiTechnology/HesaiLidar_ROS_2.0
Contribute to HesaiTechnology/HesaiLidar_ROS_2.0 development by creating an account on GitHub.
github.com
해당 깃허브를 이용하여 진행하며 종속성 설치는 아래와 같다.
sudo apt-get update
sudo apt-get install libboost-all-devsudo apt-get update
sudo apt-get install -y libyaml-cpp-dev이 상태에서 컴파일을 하면 아래와 같이 에러가 발생된다.
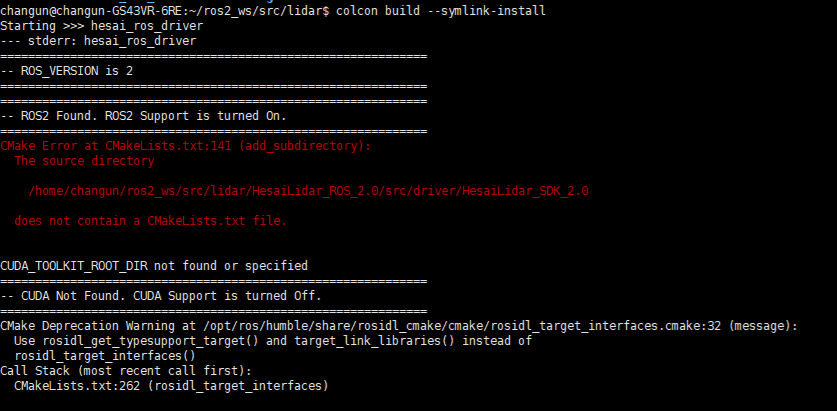
4-1. Cuda 설치
4-1-1. CUDA 없이 해도 될 것으로 보이지만 정확한 센서 사용을 위해 CUDA를 설치해준다.
* CUDA 설치는 아래 블로그 참조 하였음.
https://sanghyunpark01.github.io/ubuntu/tips/Uubntu_Cuda/
Ubuntu에 CUDA 설치하기
Ubuntu 22.04에 CUDA 12.2 설치하기
sanghyunpark01.github.io
* nvidia-smi를 통해 CUDA Version 확인
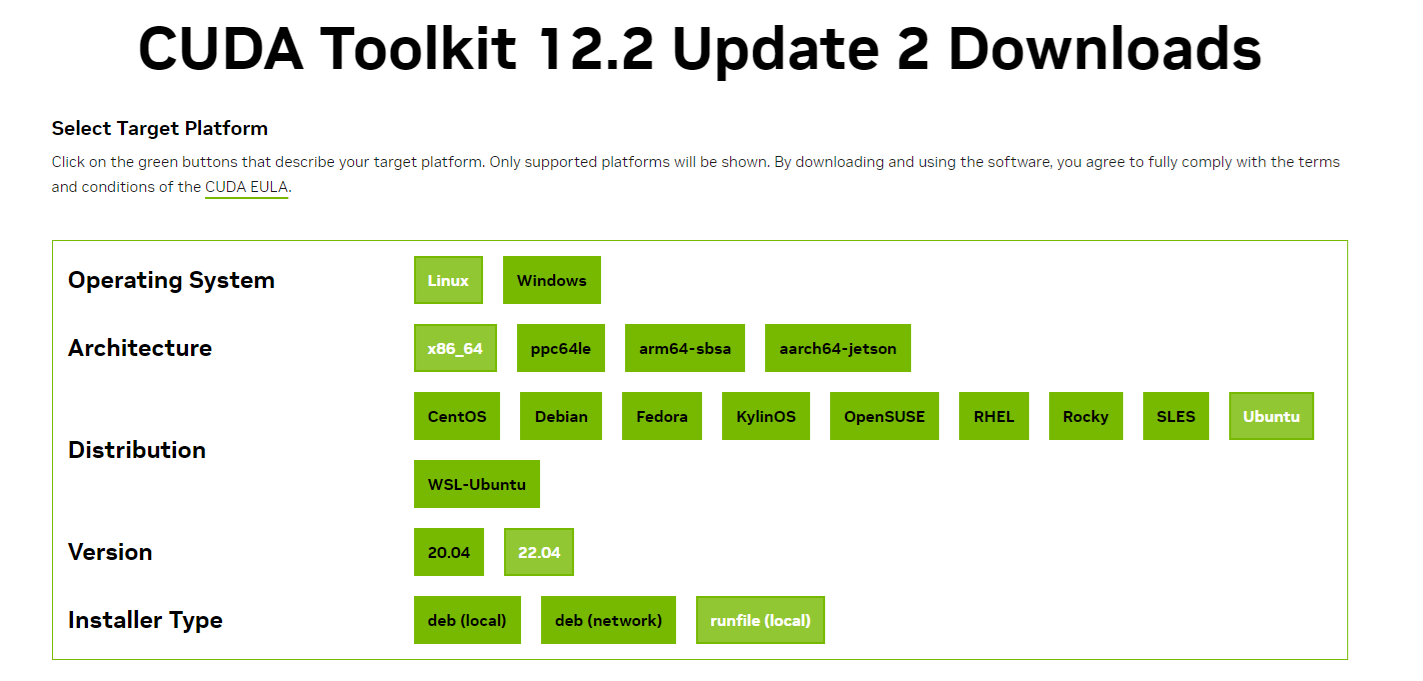
http://developer.nvidia.com/cuda-toolkit-archive
CUDA Toolkit Archive
Previous releases of the CUDA Toolkit, GPU Computing SDK, documentation and developer drivers can be found using the links below. Please select the release you want from the list below, and be sure to check www.nvidia.com/drivers for more recent production
developer.nvidia.com
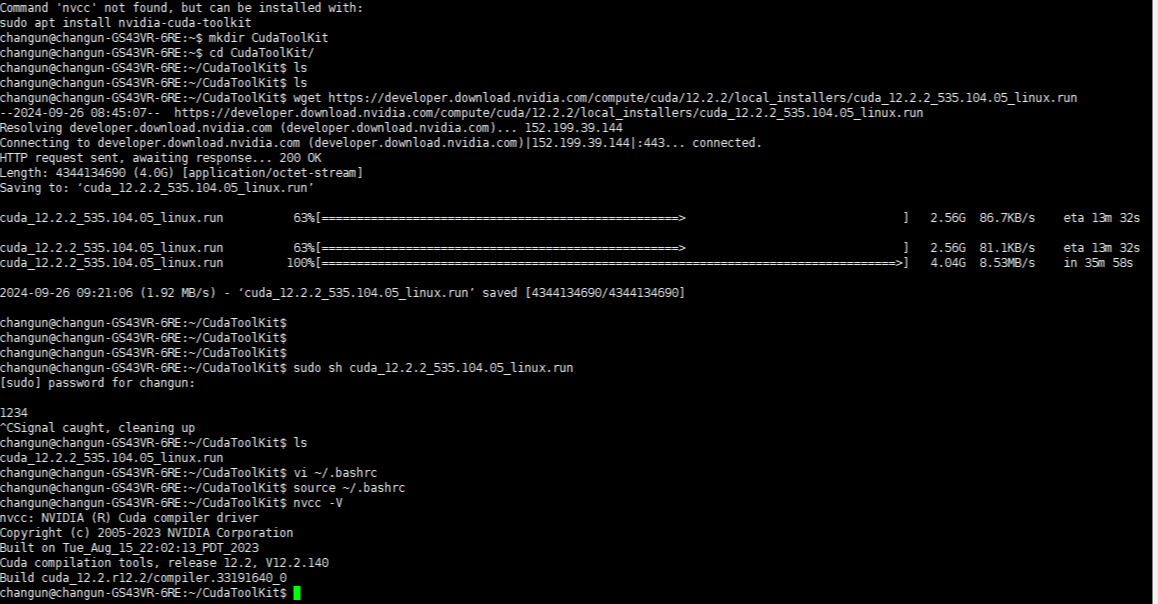
아래 명령을 통해 cuda버전 확인
nvcc --version* 환경설정
export PATH=/usr/local/cuda-12.2/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-12.2/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
5. HesaiLidar SDK 설치
* 에러 메시지 보면 CUDA 말고도 SDK가 필요함.
* 아래 깃허브를 통해 진행
https://github.com/HesaiTechnology/HesaiLidar_SDK_2.0
GitHub - HesaiTechnology/HesaiLidar_SDK_2.0
Contribute to HesaiTechnology/HesaiLidar_SDK_2.0 development by creating an account on GitHub.
github.com
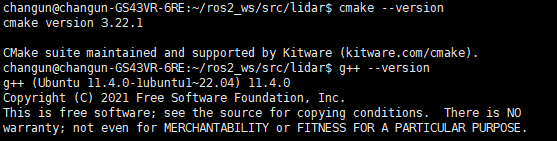
* 요구 버전 이상에서 진행
Cmake version requirement:Cmake 3.8.0 or above
G++ version requirement:G++ 7.5 or above
sudo apt install libpcl-dev libpcap-dev libyaml-cpp-dev libboost-dev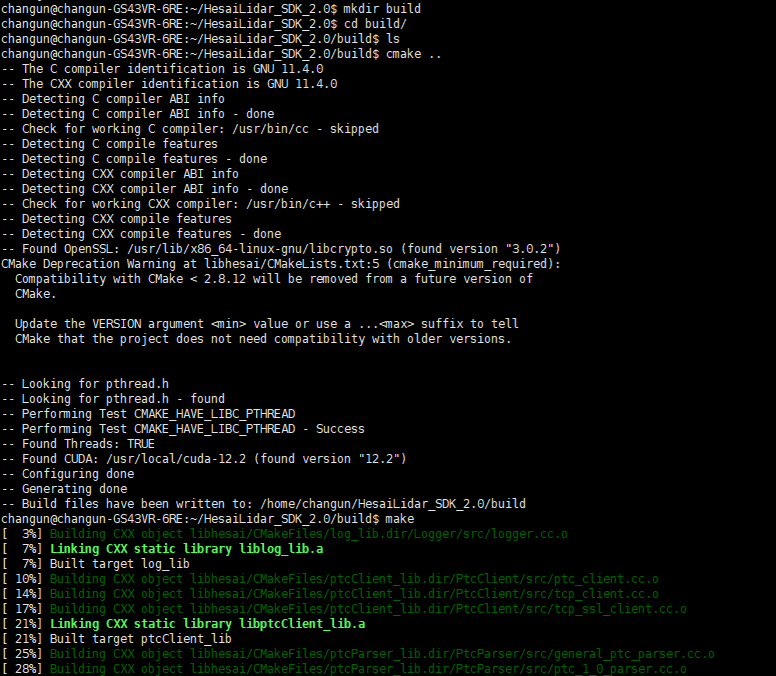
* 특별한 이상 없이 make가 잘된다.
6. 설정
* 완료 후 HesaiLidar2.0 폴더에 들어가 컴파일 해보면 그대로 오류가 뜨는데 CMakeLists를 살펴보면 add_subdirectory(src/driver/HesaiLidar_SDK_2.0) 해당 부분에서 에러가 난다.
src/driver 안에 HesaiLiar_SDK_2.0이 있어야 하기 때문에 mv를 통해서 SDK 폴더 자체를 Hesai 이동시켜준다.
7. 컴파일
* CUDA 없이 진행할 경우 CMakeLists에서 CUDA FOUND 부분을 주석 처리하고 진행하면 잘된다.
colcon build --symlink-install
8. 테스트
ros2 launch start.py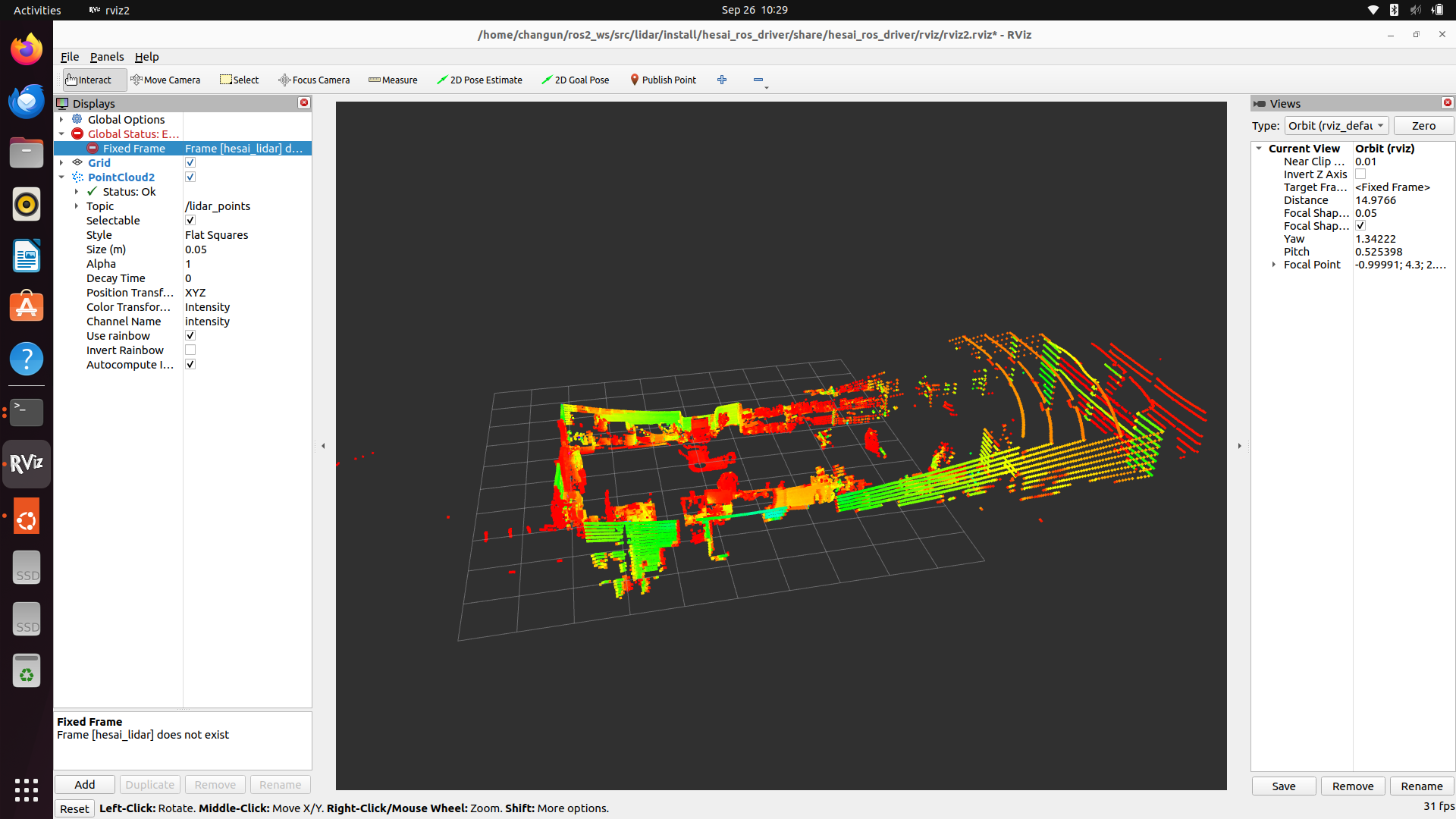
Reference :
https://sanghyunpark01.github.io/ubuntu/tips/Uubntu_Cuda/
Ubuntu에 CUDA 설치하기
Ubuntu 22.04에 CUDA 12.2 설치하기
sanghyunpark01.github.io
https://github.com/HesaiTechnology/HesaiLidar_SDK_2.0
GitHub - HesaiTechnology/HesaiLidar_SDK_2.0
Contribute to HesaiTechnology/HesaiLidar_SDK_2.0 development by creating an account on GitHub.
github.com
https://github.com/HesaiTechnology/HesaiLidar_ROS_2.0
GitHub - HesaiTechnology/HesaiLidar_ROS_2.0
Contribute to HesaiTechnology/HesaiLidar_ROS_2.0 development by creating an account on GitHub.
github.com
http://developer.nvidia.com/cuda-toolkit-archive
CUDA Toolkit Archive
Previous releases of the CUDA Toolkit, GPU Computing SDK, documentation and developer drivers can be found using the links below. Please select the release you want from the list below, and be sure to check www.nvidia.com/drivers for more recent production
developer.nvidia.com
'프로그래밍 > HardWare' 카테고리의 다른 글
| [Sensor] Sick TiM571 윈도우 ip 및 뷰어 셋팅 (0) | 2023.04.27 |
|---|---|
| Intel RealSense Viwer 및 SDK Ubuntu 20.04 설치 (4) | 2022.09.23 |
| [Ubuntu] 우분투 20.04 부팅 USB 만들기 (0) | 2022.09.23 |
| [부팅디스크] Windows10 포맷 USB 만들기 (0) | 2022.02.05 |
| [Asus] 노트북 전원 안켜지는 사례 (12) | 2021.05.25 |



