
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 마리아 DB
- 환경설정
- 반복문
- 등차수열
- 오늘도 우라라 공략
- 우분투
- JungOl
- mariaDB
- publish
- 그랑사가
- 오늘도 우라라 펫 공략
- 기초
- 오늘도 우라라
- C++
- Subscribe
- 데이터 베이스
- mysql
- LeetCode
- 리눅스
- C언어
- 오늘도 우라라 펫
- 프로그래밍
- install opencv-4.4.0 on ubuntu 22.04
- Linux
- ros
- 토픽
- while
- topic
- ubuntu
- MSG
- Today
- Total
하루의 쉼터
[환경설치] Ubuntu ,ROS Indigo 설치, 환경설정, 테스트 본문
목표
l ROS Indigo install
이해가 어려운 경우 용어 정리를 보고와주세요.
2019/09/16 - [프로그래밍/Linux] - [ROS] ROS 용어 정리
제 환경은 Virtual Box로 구동하였고 Ubuntu 14.04 LTS 버전입니다. 환경이 다르면 다를 수 있으니 참고 부탁드립니다.
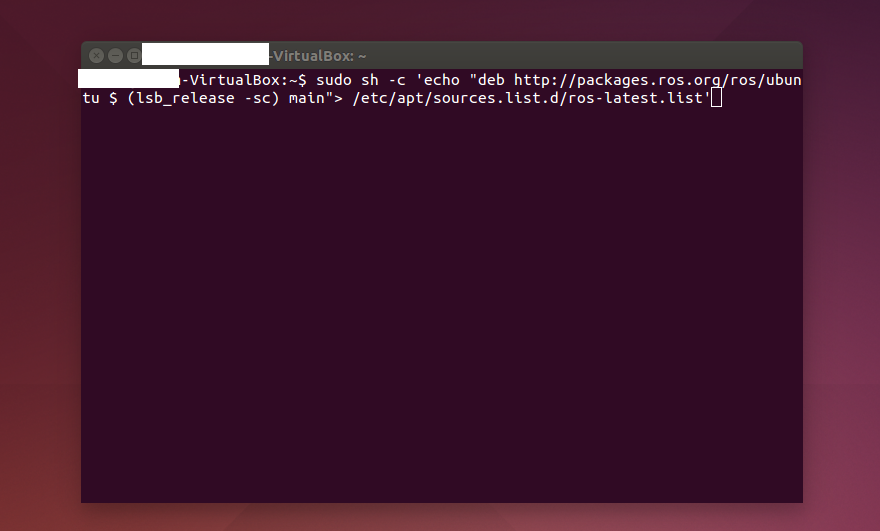
1. Cntl + Art + T를 통해 터미널을 열어줍니다.

2. 아래와 같이 sudo를 통해 관리자 권한으로 추가해줍니다.
| sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list' |
3. 패키지 다운을 위하여 공개키를 설정해줍니다.
| sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |

3-1. wiki 에서는 문제가 있을 경우 대체 방안으로 아래와 같이 사용하라고 나와있습니다.

4. 우분투 관련된 패키지 업데이트를 진행하여 줍니다.
| sudo apt-get update |
| sudo apt-get upgrade |

5. ROS Indigo - desktop -full 버전을 설치해줍시다.
| sudo apt-get install ros-indigo-desktop-full |

6. 컴파일하려는 소스에 대한 시스템 종속성을 쉽게 설치할 수 있으며 권한을 얻기 위해 초기화 및 업데이트가 필요하다고 합니다. 그러므로 rosdep 초기화를 해줍니다.
| sudo rosdep init |

6-1. rosdep 업데이트도 해줍니다.
| rosdep update |
7. 새로운 쉘이 실행될 때마다 ROS 환경 변수가 bash 세션에 자동으로 추가된다고 하니 저는 해주었습니다.
이부분은 넘어가도 괜찮습니다.
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
8. ROS에서 자주 사용되는 명령 줄 도구이며 별도의 패키지로써 유용하므로 설치해줍니다.
| sudo apt-get install python-rosinstall |

9. ROS의 작업환경을 위해 (catkin) 작업 폴더 생성을 해줍니다.
| mkdir -p ~/catkin_ws/src |
| cd ~/catkin_ws/src |
| catkin_init_workspace |
10. catkin make test를 해줍니다.
| cd ~/catkin_ws/ |
| catkin_make |
11. 설치는 완료 되었습니다. 이제 환경 설정을 해줍니다.
아래의 명령어를 통해 bashrc파일을 열어 줍니다. Atom이나 Visual code등 사용하셔도 괜찮습니다.
| gedit ~/.bashrc |

12. 파일을 열고 세가지 항목을 맨아래에 입력해주어야 합니다.
virtual box linux 에서의 아이피는 다르므로 다음글 참고 바랍니다. :
2019/09/09 - [프로그래밍/정보] - [정보]Windows ip확인, Linux ip 확인
# set ROS Indigo
source /opt/ros/indigo/setup.bash
source ~/catkin_ws/devel/setup.bash
# set ROS Network
export ROS_MASTER_URI=http://자신의 아이피 주소:11311
export ROS_HOSTNAME=자신의 아이피 주소
# set ROS alias command
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'
12-1. 단축 명령어
alias 단축 명령어
cw : 위에서 설정해 둔 catkin 작업 폴더인 ~/catkin_ws로 이동
cs : catkin 작업 폴더 중 소스 파일이 있는 ~/catkin_ws/src로 이동
cm : catkin 작업 풀더인 ~/catkin_ws로 이동한 후, catkin_make 명령어로 ROS 패키지 빌드
12-2. ROS 환경 설정 확인 하는 명령어는 아래와 같습니다.
| export | grep ROS |
13. ROS Indigo 테스트를 위해 명령어 입력
| rosorce |
13-1. 새로운 터미널 창을 열고 아래의 명령어를 입력
| rosrun turtlesim turtlesim_node |

14-2. 아래의 명령어를 입력하면 조종 할 수 있습니다.
| rosrun turtlesim turtle_teleop_key |

설치 및 환경 설치 테스트 완료 되었습니다.
14. ROS 개발 환경 구축을 위해 아래와 같은 명령어를 입력해 줍니다.
| sudo apt-get install qtcreator |
| qtcreator |

수고하셨습니다.
'프로그래밍 - 개발 > Linux' 카테고리의 다른 글
| [Doxygen] Doxygen 설치 및 사용 (0) | 2021.03.05 |
|---|---|
| [ubuntu] apt-get upgrade error , Errors were encountered while processing: (0) | 2020.12.19 |
| [Raspberry Pi 4] Ubuntu 18.04 ROS Melodic 설치 (0) | 2020.12.15 |
| [INSTALL] Virtual BOX를 통한 우분투 16.04설치 (0) | 2020.11.30 |
| [환경설치] VM VirtualBox 설치 , Ubuntu 14.04 설치 (2) | 2019.09.09 |


