
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- mariaDB
- 프로그래밍
- JungOl
- 오늘도 우라라 펫 공략
- 환경설정
- 데이터 베이스
- 그랑사가
- Linux
- 우분투
- 마리아 DB
- ubuntu
- 토픽
- 등차수열
- 기초
- publish
- topic
- install opencv-4.4.0 on ubuntu 22.04
- LeetCode
- C++
- ros
- 리눅스
- MSG
- 오늘도 우라라
- 오늘도 우라라 공략
- C언어
- 반복문
- Subscribe
- 오늘도 우라라 펫
- while
- mysql
- Today
- Total
하루의 쉼터
[ROS] Full_Coverage_Path_Planner 컴파일 및 사용 본문
| Full_Coverage_Path_Planner 사용
0. 준비 : move_base 등 자율주행 패키지 존재함.
1. catkin_ws/src 디렉토리에 git clone 하여 패키지를 다운 받았다.
https://github.com/nobleo/full_coverage_path_planner
GitHub - nobleo/full_coverage_path_planner: Full coverage path planning provides a move_base_flex plugin that can plan a path th
Full coverage path planning provides a move_base_flex plugin that can plan a path that will fully cover a given area - GitHub - nobleo/full_coverage_path_planner: Full coverage path planning provid...
github.com
2. 컴파일
catkin_make --only-pkg-with-deps full_coverage_path_planner
3. launch file 확인
test_full_coverage_path_planner.launch

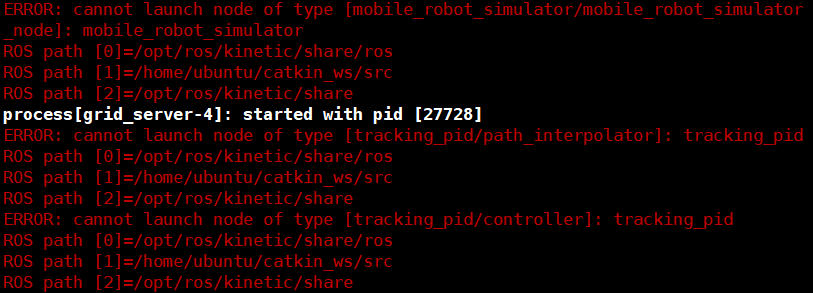
3.1 구동하려고하면 다른 노드(패키지)가 필요함을 확인하였다.
3.2 일단 구동하여 결과를 확인하였다. - 에러 확인

3.2.1 launch file을 참고하여 move_base_flex pkg git clone
https://github.com/nobleo/move_base_flex
GitHub - nobleo/move_base_flex: Move Base Flex: a backwards-compatible replacement for move_base
Move Base Flex: a backwards-compatible replacement for move_base - GitHub - nobleo/move_base_flex: Move Base Flex: a backwards-compatible replacement for move_base
github.com
클론 후 컴파일
- 캡쳐하지 못하였지만 tf2 array not found 컴파일 오류
따라서 tf2 git clone 후 컴파일을 하였음.
tf2 - ROS Wiki
kinetic melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org

tf2 컴파일 완료
move_base_flex 재컴파일

move_base_flex 컴파일 완료 후 launch 재실행하여 에러 확인하여 에러가 없어졌는지 확인한다.
에러가 줄은 것을 볼 수 있다.
3.2.2 mobile_robot_simulator git clone 후 컴파일
https://github.com/nobleo/mobile_robot_simulator
GitHub - nobleo/mobile_robot_simulator: A simple ROS simulator for mobile robots. Simply subscribes to incoming velocity command
A simple ROS simulator for mobile robots. Simply subscribes to incoming velocity commands, and updates odometry based on this. - GitHub - nobleo/mobile_robot_simulator: A simple ROS simulator for m...
github.com

에러 감소 확인
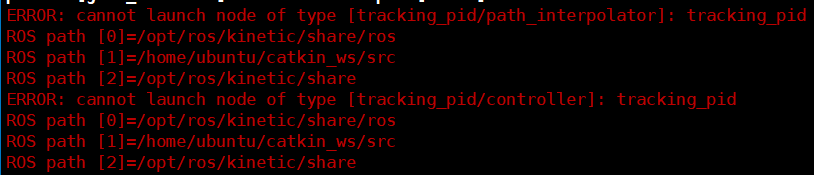
3.2.3 tracking_pid git clone 후 컴파일

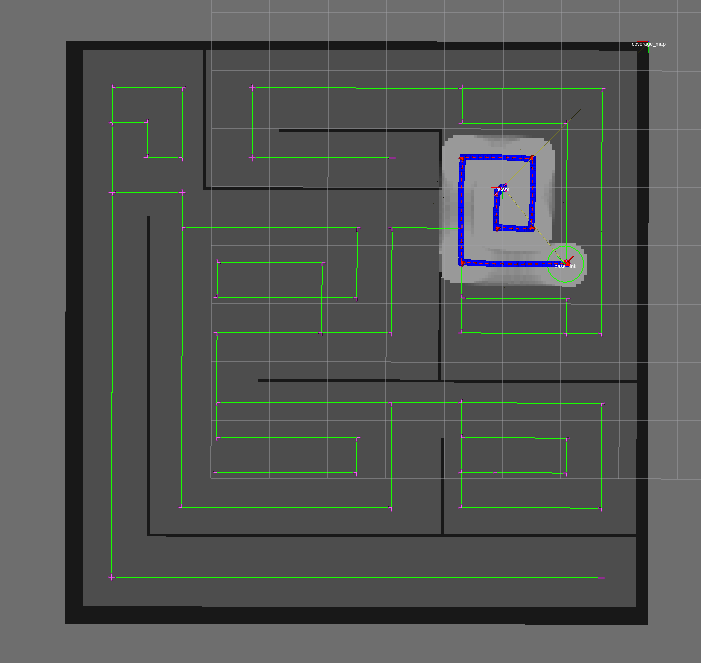
4. roslaunch를 통하여 시뮬레이터 구동 확인.
'프로그래밍 - 개발 > ROS' 카테고리의 다른 글
| Gazebo Path (0) | 2025.01.22 |
|---|---|
| [actionlib] Fail: RECALLED: This goal was canceled because another goal was recieved by the simple action server. (0) | 2021.11.24 |
| [ROS] param vs rosparam (0) | 2021.09.20 |
| [ROS] catkin_ws 구조에 관하여 (0) | 2021.09.16 |
| [Error] Github & Source Tree Push Error | Git Token Error (0) | 2021.09.02 |

