
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
Tags
- 오늘도 우라라 펫 공략
- 오늘도 우라라
- 기초
- 그랑사가
- mysql
- MSG
- 반복문
- 데이터 베이스
- while
- 우분투
- Subscribe
- mariaDB
- 등차수열
- C++
- C언어
- 마리아 DB
- JungOl
- install opencv-4.4.0 on ubuntu 22.04
- 오늘도 우라라 펫
- LeetCode
- 프로그래밍
- 리눅스
- 오늘도 우라라 공략
- topic
- 환경설정
- ros
- publish
- ubuntu
- 토픽
- Linux
Archives
- Today
- Total
하루의 쉼터
XSense Ros2 Launch for humble 본문
반응형
1. XSense Ros2 Launch Clone
* 공식 지원은 없어 BlueSpace-ai 사에서 오픈소스로 공개한 버전을 사용하면 된다.
* 해당 버전은 Galatic이나 Humble에서도 동작한다.
git clone https://github.com/bluespace-ai/bluespace_ai_xsens_ros_mti_driver.git
2. Param 수정
vi param/xsens_mti_node.yaml
해당 파일에 윗부분을 변경해주면 된다.
scan_for_devices는 true로 해두면 에러가 발생되니 수동으로 찾을 수 있게 false로 변경한다.
port는 device port를 적어주면되는데 /dev/ttyUSB0가 기본적일 것이다.
baudrate는 아래 툴을 사용하여 Device Setting을 보면 나와있다.
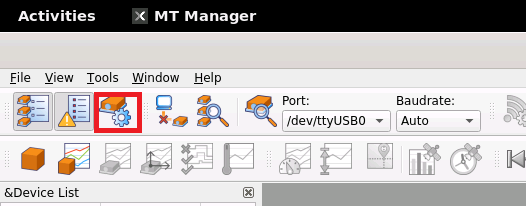
2024.11.13 - [프로그래밍/SoftWare] - Install XSense Manager for Ubuntu22.04 feat. MTi-630
3. 구동
colcon build --symlink-install
source install/setup.bash
ros2 launch xsens_mti_node.launch.py
Reference :
https://github.com/bluespace-ai/bluespace_ai_xsens_ros_mti_driver/tree/ros2_0_galactic
반응형
'프로그래밍 > ROS2' 카테고리의 다른 글
'프로그래밍/ROS2' Related Articles
more



Comments