
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 리눅스
- 마리아 DB
- 오늘도 우라라
- mariaDB
- publish
- 토픽
- 그랑사가
- 기초
- 프로그래밍
- ubuntu
- install opencv-4.4.0 on ubuntu 22.04
- Linux
- 오늘도 우라라 펫 공략
- LeetCode
- 데이터 베이스
- 환경설정
- 오늘도 우라라 펫
- 등차수열
- mysql
- topic
- while
- C++
- ros
- MSG
- 반복문
- C언어
- 우분투
- Subscribe
- 오늘도 우라라 공략
- JungOl
- Today
- Total
하루의 쉼터
 [정보] 정제에 관하여 - 승급, 리뉴얼, 정제
[정보] 정제에 관하여 - 승급, 리뉴얼, 정제
l 정제에 관하여 - 승급, 리뉴얼, 정제 - 오늘도 우라라는 무기에 대해 강화를 할 수 있고 이와 별개로 정제라는 시스템이 있습니다. 네이버 국어 사전에 찾아보면 정제 : 물질에 섞인 불순물을 없애 그 물질을 더 순수하게 함. 라고 나와 있으며, 즉 강화시켜준다는 말입니다. 본문을 통하여 우라라의 정제에 대해 알아보겠습니다. 무기를 클릭하면 아래 정제 항목이 있습니다. 정제를 하게 되면 강화 수치가 올라가며 하위 - 하급 - 중급 - 상급이 있습니다. 상승만 하는 것이 아닌 하락하는 경우도 있습니다. 이에 따라 기존 상태 유지, 속성 교체를 통해 전에 가지고 있던 스탯을 가지고 있을지 바꿀지 정할 수 있습니다. 기존 상태 유지는 전에 스탯으로 돌아가며 속성 교체는 바뀐 스탯이 적용됩니다. 이 속성은 변..
 [명령어] 리눅스 중요 명령어 모음
[명령어] 리눅스 중요 명령어 모음
l 리눅스 명령어를 익혀보자 * 명령어 뒤에 --help를 붙이면 더욱 자세한 가이드가 영어로 나온다. ls 디렉토리에 있는 목록을 보여준다. 옵션 : ls - x 의 형식을 사용하며 조합이 가능하다. ls -a : 숨겨진 파일 까지 다보여준다. ls -l : 자세한 정보를 보여준다. ls -h : mb, kb등 사람이 보기 좋게 표기해준다. ls -t : 시간에 따라 정렬해준다. ls -s : 사이즈에 따라 정렬해준다. ls -r : 거꾸로 출력한다. pwd 현재 위치를 알려준다. cd 디렉토리 이동, 즉 현재 위치를 이동한다. 옵션 : cd - : 이전 위치로 돌아간다. cd / : 루트 디렉토리로 이동 cd ~ : home으로 이동 rm 삭제 옵션 : rm * : 전부 삭제 rmdir : 폴더 삭제..
 [환경설정]Virtaul Box 어댑터에서 네트워크 이름을 찾아보자.
[환경설정]Virtaul Box 어댑터에서 네트워크 이름을 찾아보자.
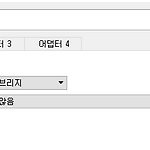
l Virtaul Box 어댑터에서 네트워크 이름을 찾아보자. 1. 네트워크 어댑터의 이름이 없는 경우. 2. 제어판을 통해 네트워크 연결 검색 - > 네트워크 연결 보기 3. 이더넷 오른쪽 클릭 -> 속성 4. 설치 5. 서비스 -> 추가 6. 디스크 있음 클릭 7. 찾아 보기 클릭 8. 자신의 Virtaul Box 경로 : Oracl\VirtualBox\drivers\nestwork\netlwf\ 아래의 파일 클릭 후 확인 9. 이더넷 속성에 나타난 것을 확인. 10. Virtaul Box 네트워크 브릿지 어댑터 이름에 보면 잘 나온 것이 확인 됩니다.
 [QT] QT Creator를 사용해보기.
[QT] QT Creator를 사용해보기.
l QT Creator 사용해보기. * ubuntu18.04버전 이하는 해당 글로 해결이 되나 20.04부터는 아래링크를 통하여 설치하면 간편하다 https://github.com/ros-industrial/ros_qtc_plugin GitHub - ros-industrial/ros_qtc_plugin: ROS Qt Creator Plug-in (https://ros-qtc-plugin.readthedocs.io) ROS Qt Creator Plug-in (https://ros-qtc-plugin.readthedocs.io) - GitHub - ros-industrial/ros_qtc_plugin: ROS Qt Creator Plug-in (https://ros-qtc-plugin.readthedocs...
 [환경설정] QT ROS Plugin 설치
[환경설정] QT ROS Plugin 설치
l Virtual Box Ubuntu에서 QT ROS plug-in 설치 l Ubuntu 14.04에서 발생하는 QT Creator 문제 해결 1. Virtual Box Ubuntu 및 ROS Indigo 환경 설치가 되어 있어야 합니다. 2019/09/09 - [프로그래밍/Linux] - [환경설치] Ubuntu ,ROS Indigo 설치, 환경설정, 테스트 [환경설치] Ubuntu ,ROS Indigo 설치, 환경설정, 테스트 목표 l ROS Indigo install 이해가 어려운 경우 용어 정리를 보고와주세요. 2019/09/16 - [프로그래밍/Linux] - [ROS] ROS 용어 정리 제 환경은 Virtual Box로 구동하였고 Ubuntu 14.04 LTS 버전입니다. 환경이 다.. cha..
 [환경설정]Virtual Box Ubuntu 와 Windows 공유 폴더 만들기
[환경설정]Virtual Box Ubuntu 와 Windows 공유 폴더 만들기
l Virtual Box Ubuntu 와 Windows 공유 폴더 만들기 1. Windows 상에서 새폴더 생성 2. Virtual Box 에서 장치 - > 공유 폴더 -> 공유 폴더 설정 클릭 3. 머신 폴더 -> 추가 -> 기타에서 경로 추가 4. 확인 클릭 5. 명령어 입력 $ sudo mount -t vboxsf 공유할 폴더명 /home /User /공유할폴더
 [환경설정] Virtual Box와 Visual Studio 포트 포워딩, SSH 연결 , 연동
[환경설정] Virtual Box와 Visual Studio 포트 포워딩, SSH 연결 , 연동
l Virtual Box와 Visual Studio 포트 포워딩, SSH 연결 , 연동 1. Visual Studio 상에서 Linux가 깔려 있어야 합니다. Visual Studio 프로젝트 – 플랫폼 간 – Linux 존재 확인 1-1. 없을경우 Visual Studio 설치 관리자 열기 1-2. c++ 를 사용한 linux 개발 및 구성 요소를 선택하고 설치해줍니다. 2. 설치 후 visual studio 오른 쪽 상단에 빠른 실행에서 - 연결을 입력하여주세요. 3. 플랫폼 간 - > 연결 관리자를 선택해주세요. 4. 추가를 누르시면 아래와 같은 이미지가 나옵니다. 5. Virtual Box 에서 장치 -> 네트워크 -> 네트워크 설정 을 눌러주세요. 6. 고급 - > 포트 포워딩을 눌러주세요. 7..
 [ROS] 메시지 통신 (Topic, Service, Action)
[ROS] 메시지 통신 (Topic, Service, Action)
l ROS 메시지 통신의 종류와 차이점에 대해 알아보자. 토픽(Topic) - 단방향, 비동기 통신 - 퍼블리셔 : 메시지 송신, 서브스크라이버 : 메시지 수신에 이용 - 지속적으로 발생하는 센서 데이터에 적합 - 1:n, 1:1, n:1, n:n 전부 통신 가능. 서비스(Service) - 양방향, 동기 통신 - 서비스 서버, 서비스 클라이언트간 통신 - 클라이언트 요청이 있을때 만 서버에서 응답 - 요청과 응답이 끊기면 노드 접속 끊김 액션(Action) - 양방향, 비동기 통신 - 요청 중간 피드백이 필요한 경우 사용 - 해당 되는 목표 Goal과 결과 Result 피드백 Feedback이 있다. - 메시지 전송 방식 자체는 비동기식인 토픽과 동일 정리 종 류 동기 / 비동기 방향 참고 Topic ..